

Kenny Rose is an applied mathematician and fisheries scientist by training and has worked on many ecosystems throughout the US and internationally. He has spent years studying the San Francisco Bay and the Gulf of Mexico, and now focuses on the Chesapeake Bay at the University of Maryland Center for Environmental Science’s Horn Point Laboratory near Cambridge, Maryland.
Mathematical models—like those used for weather forecasts or to predict storm tracks—are key to studying and predicting many environmental phenomena. They typically take in data about the current state of the environment, then use computerized versions of physical laws to calculate expected outcomes. And even though nature sometimes doesn’t behave as predicted, it’s still useful to know that rain is expected or if the tide in the Bay is going to be high.

Dr. Kenny Rose, the France-Merrick Professor in Sustainable Ecosystem Restoration at Horn Point Laboratory of the University of Maryland Center for Environmental Science
But what if there are no laws that apply, only some fuzzy rules of thumb? For example, what if you want to model the behavior of fish—not just how they move around, but how they respond to warmer water or a depleted food supply? For that matter, how would you model the behavior of people or of corporations? There are no physical laws for that, but scientists have developed a different type of model for just such purposes. Called an “agent-based model” or sometimes a “complex adaptive system” model, it creates a virtual world that can track the interaction of large numbers of agents (rockfish or blue crabs or people) with each other and with the environment around them. Such models depend on assumptions about the nature of those interactions, and if those are reasonably accurate, then what emerges from the model calculations is predictions or simulations of population-level behavior—for example, will there be plenty of crabs this year? Or how stable and resilient is the Bay’s rockfish population in the face of warming and more acidic waters (because of higher carbon dioxide levels) as a result of a changing climate.
Such predictions—often based on hundreds or thousands of simulations with varying assumptions—can be compared to observed behavior to test and refine the modeling assumptions. For many fish species in Chesapeake Bay, it turns out that the critical assumptions have to do with survival while they are larvae and juveniles (before they become full adults): most very young fish don’t survive. Is that because of food availability; or does it depend on whether they live near the bottom of the bay or near the surface; or does it depend on their risk of being eaten before they can reproduce? So modelers test these and other assumptions, while also testing such variables as temperature, salinity, and the type of bottom (does it offer good ways for a young fish to hide?).
These types of virtual world models have been used for simulating such things as how fish group together, population size under different harvesting plans, interactions between different species, and the sustainability of ecosystems. At the Horn Point Laboratory, one on-going application of such models is to simulate how fish group together—known as schooling—and to test different ways to set up underwater cameras (also simulated), in order to get the most accurate estimate of the number of fish. That’s because fisheries scientists are increasingly using waterproof cameras located on the ocean bottom or on underwater drones to track populations in locations that are difficult to sample directly. But calibrating what the cameras show is tricky, because they may miss some when underwater visibility is poor or count the same fish multiple times. So Rose helped build an agent-based model of fish movements and is using that virtual world to calculate correction factors for the camera and ideas about better camera placement, leading to more accurate population counts.
Understanding how fish school is important for a number of reasons, not just for improving population counts. For juveniles, being in a crowd is one of the best defenses against being eaten. And from a fisheries perspective, schools are often where the best fishing is to be found.
The models do provide insights into population size and the food webs that support it, which lets fishery managers know whether they should allow larger harvests or increase protections in a given location. And because rockfish move around—they might come into the Bay as youngsters, then leave later on—rockfish and many species are managed at regional (mid-Atlantic) scale. Crabs move outside the Bay as well.
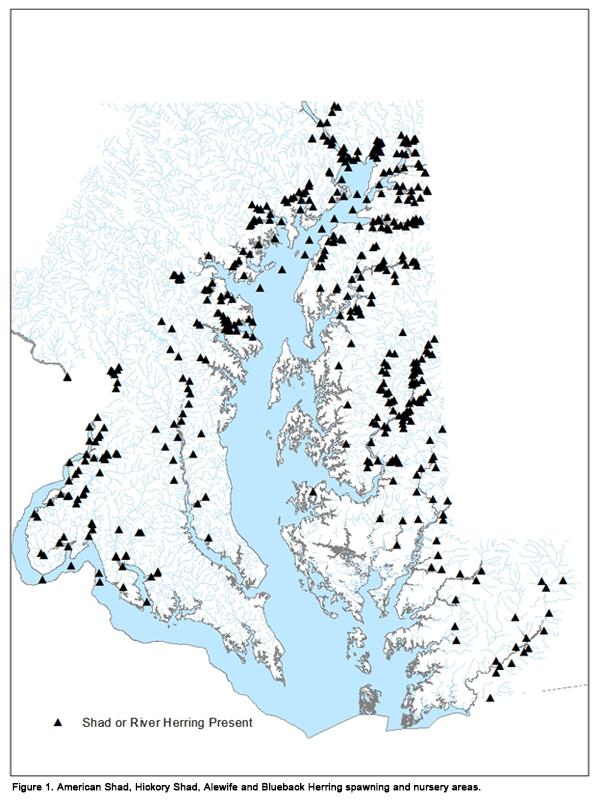
This map identifies spawning ground sites for Shad or River herring across the Chesapeake Bay. River herring migrate from saltwater to freshwater to spawn, as do Striped bass, Hickory and American shad, Blueback herring, Alewife, White perch, and Yellow perch. Map produced by the Maryland Department of Natural Resources
Oysters, on the other hand, stay put and are managed locally. Another ongoing effort at the Horn Point laboratory, led by Dr. Elizabeth North, uses modeling to understand how temperature, salinity and circulation patterns in the Bay affect the transport of oyster larvae. That depends initially on models of tides and currents, which can be calculated from physical laws. Then agent-based models build on those results to help the scientists understand where the larvae end up—and where they don’t. This knowledge can be used to ensure oyster larvae have the right habitat in the right location to settle and grow.
The bottom line is that the health of the Bay and of its fisheries now depend on careful management, and today’s management practices in turn depend increasingly on detailed data collection and on sophisticated modeling—including modeling the behavior of fish. So remember to give a mental “thank you” to the modelers the next time you host a crab feast.
Al Hammond was trained as a scientist (Stanford, Harvard) but became a distinguished science journalist, reporting for Science (a leading scientific journal) and many other technical and popular magazines and on a daily radio program for CBS. He subsequently founded and served as editor-in-chief for 4 national science-related publications as well as editor-in-chief for the United Nation’s bi-annual environmental report. More recently, he has written, edited, or contributed to many national assessments of scientific research for federal science agencies. Dr. Hammond makes his home in Chestertown on Maryland’s Eastern Shore.
Angela Rieck says
Fascinating, thank you